前沿科普 | 提问:你了解汽车智能底盘吗?
智能底盘(intelligent chassis of vehicles)是为自动驾驶系统、座舱系统、动力系统提供承载平台,具备认知、预判和控制车轮与地面间的相互作用、管理自身运行状态的能力,并具体实现车辆智能行驶任务的系统。
汽车智能底盘的必要性
随着全球汽车产业向电动化、智能化和网联化的加速转型,自动驾驶技术和新能源汽车的快速发展,推动了汽车技术的深刻变革。在此背景下,智能底盘技术作为车辆的核心承载和功能集成平台,不再仅仅是支撑车身的“铁架子”,而是进化为整车的执行基石与安全防线,已成为引领未来汽车产业发展的关键领域。
与传统底盘相比,智能底盘不仅在机械结构上进行优化,更通过软硬件的深度融合,实现对转向、制动、悬架和驱动等关键子系统的实时精准协调控制,从而在不同路况和工况下保持整车的安全、舒适与高效运行。智能底盘的核心在于通过感知单元获取车辆状态、路面参数及环境信息,经由底盘域控制器进行多源数据融合与控制策略运算,再驱动线控转向、线控制动、线控悬架以及动力驱动系统协同响应,而底盘线控化通过取消轮间和轴间机械连接约束,为车辆运动精准控制、软硬件解耦和模块化设计提供了基础,实现了系统硬件构型与软件算法独立开发,实现了整车在操控性能、能量利用率和自动驾驶适配性上的显著提升。
汽车智能底盘的发展现状
智能底盘技术的发展是汽车工业由“机械驱动”向“软件定义”深度转型的重要体现,其演化历程与汽车电子化、驱动系统电动化以及自动驾驶技术的进步高度耦合。从全球范围看,智能底盘架构的发展可大致分为四个阶段:早期机电混合阶段、功能电子化阶段、域集成阶段与全域智能化阶段。
目前,全球已进入全域智能化阶段,智能底盘不再局限于机械和电子协同的优化,而是通过集中式电子电气架构(EEA)实现与车身、动力、电池管理以及自动驾驶系统的全车级数据互通与功能重构。典型代表为丰田的 e-TNGA 平台(如图1所示)、大众的 MEB 平台以及吉利 SEA 浩瀚架构,这些平台不仅实现了动力、电控和结构的深度集成,还在底盘层面嵌入了高等级的功能安全与冗余控制策略,以适配 L4 级自动驾驶的可靠性需求;特斯拉底盘整合一体化压铸与48V架构,通过中央计算平台联动线控转向、动力及悬架,实现毫秒级响应与全域冗余,为高阶智驾提供稳固执行保障。
同时,中国自主品牌在这一时期实现了从跟跑向部分领域并跑甚至超越的转变,例如东风奕派007轮毂电机底盘作为国内首款轮毂电机量产乘用车,实现“轮边即动力”,通过高效散热和矢量控制,大幅提升电机性能与操纵稳定性;比亚迪的 e 平台 3.0(如图2所示)在刀片电池 CTB(Cell to Body)布局下,底盘强度、电池安全性与整车操控性能显著提升;蔚来的新一代智能底盘硬件系统由ICC智能底盘域控制器、空气弹簧+CDC动态阻尼控制系统组合而成,成为其AI智能底盘系统和4D舒适领航功能的硬件基础。

图1 丰田e-TNGA平台

图2 比亚迪e平台3.0
整体来看,国外车企在底盘控制算法、域控制器算力及功能安全标准方面保持领先,特斯拉在软硬件迭代与数据闭环上优势明显。国内厂商则在平台化架构、能源与底盘一体化、供应链成本优化上形成差异化竞争力,正加速缩小差距。未来,随着集中式电子电气架构、线控技术及新型材料应用深化,中国厂商有望在全域智能底盘与低成本分布式驱动平台方向构建自主可控的核心技术体系。
汽车智能底盘的关键技术
智能底盘正向高度集成化、平台化及软件定义演进:电子电气架构向域集中与中央计算升级;传感器与执行器趋于固态化、智能化与深度融合,AI赋能显著提升感知与控制性能;整车集成控制、冗余安全及极限工况处理能力通过模型预测控制、强化学习等方法不断增强,实现动力学全局优化。同时,智能底盘与高阶自动驾驶、电动化平台、智慧交通(V2X)深度融合,支撑车辆在复杂场景下的自适应、高效与安全运行。
一、智能底盘构型与设计技术
智能底盘技术作为车辆的核心承载和功能集成平台,已成为引领未来汽车产业发展的关键领域。其构型与设计技术的创新,既是满足消费者对高品质汽车需求的必然选择,也是提升汽车企业核心竞争力的关键。
按照动力传输方式的不同,智能底盘可分为集中驱动型、分布式驱动型和混合驱动型。集中驱动型通过单个或多个集中式电机与传动装置向车轮分配动力,具有结构成熟、制造成本可控等优点,是当前中大型电动车主流配备方案;分布式驱动型在每个车轮侧布设独立驱动单元,可独立控制每个车轮的转矩和转速,不仅提高了车辆的操控灵活性,还可以与独立转向配合实现如横向行驶、原地掉头等特殊机动能力,但对控制算法、热管理及耐久性要求更高,尤其是其动力学控制需着重考虑系统内部参数摄动与外部扰动等不确定性的影响,以保障运动控制的鲁棒性与精度;混合驱动型则结合了以上两种方案的优势,通过不同车轴采用不同驱动布局,在成本、性能与稳定性之间寻求平衡,尤其适用于特殊用途车辆或复杂任务平台。
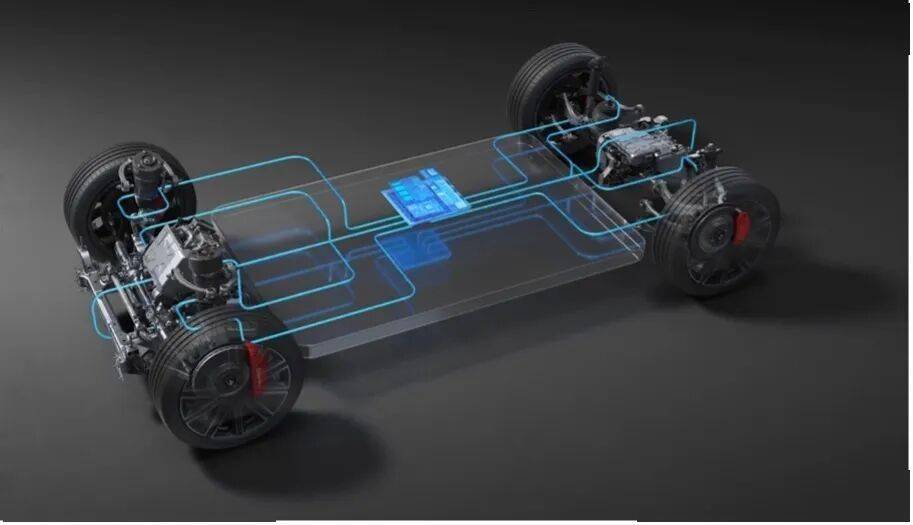
图3 途灵智能底盘
总体而言,智能底盘正由功能分散向高度集成演进,由机械主导向软件定义转变,并在能源一体化、模块化平台和跨场景适应能力方面不断突破,如图3所示为鸿蒙智行途灵智能底盘。对于我国汽车产业而言,集中驱动的全域智能底盘可能会在中短期内凭借成本优势和制造可行性大规模量产,但分布式电驱动车辆因其独特的优势,包括高度的灵活性、高效的驱动与制动性能、卓越的智能化潜能等,在民用和军用场合中扮演着越来越重要的角色,并逐步成为学界和业界公认的未来车辆构型的核心发展方向。
在未来五到十年的时间维度上,软件定义汽车功能的增加与升级可通过软件的远程部署与更新来实现,汽车硬件将成为模块化、通用化的平台和资源池,支撑整车软件多样化开发与部署。智能底盘技术也将朝着硬件标准化、接口开放化、软件可持续升级以及能源结构一体化方向快速发展,成为支撑“软件定义汽车”和“平台化造车”战略的核心基础。
二、智能底盘传感器与执行器技术
随着汽车电子电气架构(E/E)从分布式向跨域集中式演进,智能底盘正经历从被动响应向主动控制的范式转移。在满足汽车智能化控制相关需求的情况下,不断缩小传感器体积,优化传感器结构,并实现多种传感器集成化处理,最大限度克服汽车内部空间不足的局限,增强智能传感器在汽车电子技术中的应用成效。
继传感器硬件形态的固态化与集成化之后,人工智能(AI)技术的注入正在引发智能底盘感知系统的第二次认知革命——从物理量的被动测量向场景语义的主动理解跨越。这种端侧智能架构不仅有效缓解了集中式 E/E 架构面临的海量高频数据传输带宽瓶颈,更推动底盘控制逻辑从僵化的基于规则向自适应的数据驱动范式转型,为解决车辆动力学中高度非线性及难以直接测量的感知难题提供了全新的思路,如图4所示为AI技术赋能的蔚来天行智能底盘。

图4 AI技术赋能的蔚来天行智能底盘
在执行器技术方面,底盘执行器集成化已基本完成单体机电一体化阶段,正处于跨执行器集成的阶段;制动的主缸建压单元-电磁阀系一体化、悬架的电机-泵一体化、驱动的轮边共壳体等,均已有量产实例。如博世第二代集成制动控制系统(IPB),将制动助力与ESC功能高度集成于一体化模块中、模块中,并通过与线控转向系统冗余算法协同,实现了在制动失效或转向受限时的毫秒级控制补偿,提升了底盘域的集成度与响应速度;比亚迪云辇-Z主动悬架首发搭载于仰望 U7,其悬浮电机的定子与动子直接集成在原本减振器的缸体内,实现了“电机-执行器”的一体化封装。这种设计省去了复杂的液压管路、泵站和阀组,具有降低底盘占用空间的潜力;仰望U8搭载易四方动力系统,将高性能永磁同步电机与减速器、控制器高度集成在轮边共壳体内,允许四个车轮独立受控,不仅实现了“原地掉头”和“应急浮水”功能,更标志着驱动系统从中央传动向分布式末端执行的彻底演进。
随着控制算法、电子电气架构和感知融合技术的不断成熟,底盘集成化的终极产物“角模块”有望于 2027 年前后率先应用于高端新能源汽车、重载车辆及 Robotaxi 等特定场景,底盘将具备自适应学习与优化能力,能够根据驾驶员习惯、路面状况及车辆状态实现个性化的底盘调校,最终为用户提供更安全、更舒适、更具乐趣的整体驾乘体验。
三、智能底盘集成控制技术
底盘集成控制(Integrated Chassis Control)是指以提升整车综合性能为目标,通过一套统一的控制架构和协同策略,对传统上相互独立的底盘子系统(主要包括驱动/制动系统、转向系统、悬架系统)进行信息融合与协同干预的先进控制技术。其核心内涵在于打破各子系统间的“信息孤岛”与“控制壁垒”,通过顶层决策机制,将车辆视为一个完整的动力学耦合系统进行处理。它不再追求单个子系统性能的局部最优,而是致力于实现车辆纵向、横向、垂向动力学性能的全局协调与综合最优,具体表现为在确保车辆基础稳定性的前提下,同步提升其操纵灵活性、行驶平顺性、能量经济性以及主动安全性。该技术是智能底盘实现高级别自动驾驶功能的关键支撑技术。因为自动驾驶的决策规划层需要底盘执行层具备高度协同、快速精准且可靠的多维度运动控制能力来精确执行其指令。

图5 全线控汽车集成控制系统框架
构成整车集成控制系统的基本要素主要包括硬件架构、软件算法和通信网络三大部分。在硬件层面,其核心是域控制器(Domain Control Unit, DCU),特别是底盘域控制器,它作为分层架构中顶层和中间层的物理载体,集成了高性能的多核MCU/SoC芯片,具备强大的计算能力以运行复杂的协同决策与控制分配算法。其外围连接着遍布整车的大量传感器(如 IMU、轮速传感器、转向角传感器、摄像头、雷达等)和线控执行器(如线控制动、线控转向、电控悬架、分布式驱动电机等),这些智能执行器是指令的最终执行者。
在软件层面,核心是运行在域控制器中的集成控制算法,主要包括用于状态感知与估计的算法(如车辆状态观测器)、基于车辆动力学模型的协同决策算法(如模型预测控制 MPC、最优控制、滑模控制等)以及考虑执行器约束的控制分配算法(如优化算法、伪逆法等)。
此外,通信网络是连接所有元素的“神经网络”,高带宽、低延迟、高确定性的车载网络(如 CAN FD、 Automotive Ethernet 及其 TSN 协议)是确保各类感知信息、控制指令能够实时、可靠传输的基础,是实现高效协同控制的前提。整个系统的发展趋势是向着“中央计算+区域控制”的更高集中度电子电气架构演进,进一步简化系统结构,提升集成度和算力利用率。
汽车智能底盘的优势与增益
汽车智能底盘(如图6所示)凭借其电动化、线控化与模块化的技术特性,相较传统底盘实现了性能、效率、体验与场景适配性的全方位升级,为整车全生命周期带来了显著的经济与使用增益。
在性能层面,智能底盘的分布式电驱动技术使得各轮转矩独立可控,角模块技术使得各轮转角独立可控,通过多执行器协同作用拓宽多轴车辆控制边界,有效提升稳定性和安全性,可完成诸如坦克掉头、爆胎紧急矫正等传统底盘无法实现的操作,线控制动有效地缩短了制动距离,先进的悬架主动力控制可以大幅提升行驶平顺性与操控稳定性,助力车辆顺利通过复杂地形。
在效率层面,智能底盘所使用的轮边/轮毂电机将动力传递效率提升至新高,同时可以有效减少制动片磨损,降低维护成本;电磁悬架能够实现能量回收,在一定程度上可提升电动车的续航里程。

图6 仰望U7智能底盘示意图
在体验与场景适配层面,汽车智能底盘的模块化设计让整车核心模块实现共享,搭载模块化智能底盘的物流车辆还能实现快速换箱,提升日均运营时长;原地转向、精准循迹等功能也让特种车辆的作业范围大幅扩展。此外,智能底盘支持软件定义与OTA持续升级,可实现功能迭代优化,为高阶自动驾驶提供稳定的执行端支撑,是汽车从交通工具向智能移动空间升级的核心基础。
汽车智能底盘的技术挑战
智能底盘在快速发展的同时,面临着机械约束、系统协同、安全冗余与成本控制等多重挑战,其突破路径需依赖材料科学、控制理论与制造工艺的多学科创新,以及学界和业界的多方协作。
挑战之一:轮端集成的物理极限。例如轮毂电机虽能实现最高程度的集成化,但其工作环境温度波动范围达-50°C至130°C,由于非常接近制动盘,车辆在连续15次紧急制动后电机绕组温度可骤升80-100°C,引发永磁体磁导率下降。同时,轮毂电机使单轮簧下质量增加40%-60%,恶化了车辆舒适性。
突破路径:材料革新与结构创新,比如采用如图7所示的“液冷+风冷”复合散热方案,或采用新型石墨烯/石蜡复合相变材料与热电制冷片,可在-50°C至150°C宽温域内将电机核心部件温差控制在±5°C;通过碳纤维复合材料悬架模块实现簧下质量的减重,同时借助电磁悬架进行簧下质量负效应抑制,平衡性能与成本。
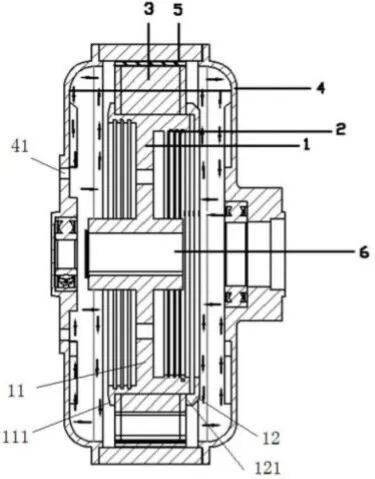
图7 一种水冷与风冷结合散热的轮毂电机结构
挑战之二:跨系统协同控制的可靠性与实时性。基于纯数据驱动的深度学习模型在底盘控制领域仍面临着落地实践的挑战,主要是黑盒效应带来的不可解释性与边界不可控风险;同时,在算力集中化趋势下,传统总线的带宽已无法满足全车范围内的数据传输需求。
解决方案:控制算法与架构升级,模型预测控制(MPC)与深度强化学习(DRL)融合让底盘实现从“被动反馈”到“主动决策”,而物理信息神经网络(PINN)既保留了 AI 处理非线性的强大能力,又解决了纯黑盒模型不可解释、不符合物理规律的安全隐患;高速以太网与时间敏感网络(TSN)结合,可以提高带宽,实现亚毫秒级延迟控制,使车载通信同时具备高带宽与确定性,支撑中央集中式架构落地。
挑战之三:在于功能安全与成本的平衡。ISO 26262标准明确要求L3及以上自动驾驶车辆的关键功能必须满足ASIL-D等级,这要求“双电机+双电源+双通信链路”的三重冗余架构,冗余设计推高了成本。
突破路径:标准化与规模化,ISO 21498-1:2023等接口规范实现了模块的即插即用,将整车开发周期从36个月缩短至20个月;规模化量产与材料替代预计到2030年可以将轮毂电机成本降至300美元/台,推动技术的普及。
汽车智能底盘的应用领域及发展前景
智能底盘作为汽车电动化与智能化的核心载体,正凭借其高度集成化、模块化与软件定义的特性,在多场景中实现深度渗透,从乘用车到商用车,从民用领域到特种场景,逐步重塑交通出行生态。
在乘用车领域,智能底盘的应用呈现高端引领、中端普及的格局。高端新能源车型通过搭载分布式驱动与主动悬架技术,实现了性能与舒适的双重突破——比亚迪仰望U8搭载的四电机独立控制架构,通过对四轮扭矩的独立精准控制,在爆胎情况下依然平稳可控,其“坦克掉头”功能(如图8所示)更是凭借扭矩矢量分配技术大大提升硬派越野的机动性;蔚来 ET9 的“天行全主动悬架”能通过毫秒级阻尼调节,实现稳托香槟塔(如图9所示)的极致垂向性能。而紧凑型电动车正通过模块化平台降低技术门槛,让智能底盘技术惠及更广泛消费者。

图8 仰望U8原地掉头演示

图9 蔚来ET9香槟塔实验
在商用车领域,智能底盘聚焦效率提升与成本优化,正在重塑物流运输与城市公交的运营模式。徐工集团新能源矿用自卸车(如图10所示)配备自主研发一体式同轴双电机,效率>95%,且再生制动能量回收效率较行业提升60%,可以适应高寒、连续下坡等多种严苛工况;比亚迪电动公交采用轮毂电机(如图11所示),加速响应灵敏,可以完美应对陡坡和快速起步工况。冷链物流车借助模块化换箱技术,15-20分钟即可完成货箱更换,日均运营时长增加1-2小时,大幅提升物流周转效率。

图10 徐工XGE136 新能源矿用自卸车

图11 比亚迪B12.b配备的轮毂电机
智能底盘在特种车辆与新兴场景的应用更凸显其技术创新的无限可能。越野救援车(如东风猛士 M917,图12)搭载四电机,综合功率超过1000马力,通过动力的精准分配能够轻松应对雪地、泥地、沙地等路面,并采用CDC阻尼器+空气悬架提高舒适性;无人清扫车(如福龙马无人清扫车)凭借四轮独立驱动实现原地转向,有效提高了作业覆盖率;VU-T10履带式无人地面作战平台(如图13所示)基于高度线控化的底盘,既能够适应各类战场地形,又具有高机动性;另有某军用越野车模块化底盘可在1小时内完成驱动形式与悬架刚度的快速切换,提升战场复杂地形通过率。

图12 东风猛士M917

图13 VU-T10履带式无人地面作战平台
展望未来,随着材料科学、控制理论与数字技术的融合与突破,智能底盘将彻底重构汽车的技术基因,推动其从“交通工具”进化为“智能移动空间”,最终实现“人-车-路-城”协同共生的智能交通系统,如图14所示。
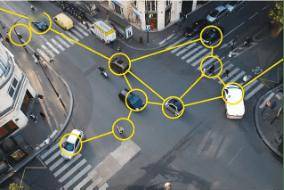
图14 协同式智能交通系统示意图
参考文献
[1] 汽车智能底盘术语和定义: T/CSAE 407-2025[S]. 中国汽车工程学会, 2025.
[2] 熊璐, 冷搏, 章新杰, 等. 汽车线控底盘技术现状与发展建议[J]. 前瞻科技, 2025, 4(2): 99-114.
[3] Tesla. Master Plan Part 3: Sustainable Energy for All of Earth[R]. 2023.
[4] 央视网. 把电机装进车轮里 我国首款轮毂电机乘用车来了[EB/OL]. 2026. https://business.cctv.com/2026/03/23/ARTInrVsh937y1sZCb958Lmn260323.shtml.
[6] Toyota Official Site. 2026 toyota bZ[EB/OL]. [2026-04-02]. https://www.toyota.com/bz/.
[7] BYD europe. e-platform 3.0[EB/OL]. [2026-04-02]. https://www.byd.com/eu/technology/byd-e-platform-3.
[8] 熊璐, 韩寅锋, 冷搏, 等. 考虑系统不确定性的分布式驱动电动汽车纵向动力学研究[J]. 机械工程学报, 2025.
[9] 鸿蒙智行官网. 途灵智能车控平台[EB/OL]. [2026-04-02]. https://hima.auto/.
[10] 杨殿阁, 刘辉, 殷国栋, 等. 分布式电驱动车辆现状与发展趋势[J]. 前瞻科技, 2025, 4(2): 84-98.
[11] 孟天闯, 李佳幸, 黄晋, 等. 软件定义汽车技术体系的研究[J]. 汽车工程, 2021, 43(4): 459-468.
[12] 汪岑楼. 智能传感器技术及其在汽车电子技术中的应用分析[J]. 时代汽车, 2023(5): 151-153.
[15] Bosch Mobility. Integrated power brake[EB/OL]. [2026-04-08]. https://www.bosch-mobility.com/en/solutions/driving-safety/integrated-power-brake/.
[16] 仰望官网. 仰望U7车型介绍[EB/OL]. [2026-04-08]. https://www.yangwangauto.com/cn.
[17] BYD. Plateforme e4[EB/OL]. [2026-04-08]. https://media.byd.com/section/technology/e4-platform.
[18] 全国四轮全地形车标准化技术委员会(SAC/TC344). 低速线控底盘通用技术要求: GB/T 43947—2024[S]. 2024.
[19] 郭耀华, 丁金全, 王长新, 等. 商用车底盘线控技术研究现状及应用进展[J]. 汽车工程学报, 2022, 12(6): 695-714.
[20] RAJAMANI R. Vehicle Dynamics and Control[M]. Boston, MA: Springer US, 2012.
[21] 熊璐, 吕宗宇, 韩伟, 等. 多轴车辆防侧翻控制发展现状综述[J]. 机械工程学报, 2026.
[22] 杨晨旭. 汽车底盘域统一横摆运动控制策略研究[D]. 长春: 吉林大学, 2025.
[23] 仰望官网. 仰望U7丨运动豪华旗舰轿车[EB/OL]. [2026-04-02]. https://www.yangwangauto.com/u7-detail-page.html.
[24] 王猛. 轮毂电机技术在新能源汽车上的应用分析[J]. 大众汽车, 2025(3): 49-51.
[25] KATSUYAMA E, OMAE A. Improvement of ride comfort by unsprung negative skyhook damper control using In-wheel motors[J]. SAE International Journal of Alternative Powertrains, 2016, 5(1): pp.214-221.
[26] 张奇祥, 王金湘, 张伊晗, 等. 智能电动汽车线控制动关键技术与研究进展[J]. 机械工程学报, 2024, 60(10): pp.339-365.
[29] ISO 26262-3:2018 道路车辆 功能安全 第 3 部分:概念阶段[S]. 日内瓦: 国际标准化组织, 2018.
[30] Kapsch. Traffic management solutions[EB/OL]. 2026. https://www.kapsch.net/en/traffic.
[31] 郝倩. 进军百万元级市场 仰望U8成比亚迪向上利器[N].
[33] 深圳仰望汽车销售有限公司. 仰望U8[EB/OL]. [2026-04-02]. https://www.yangwangauto.com/u8.
[35] 徐工集团工程机械股份有限公司. XGE136-新能源矿用自卸车[EB/OL]. 2025. https://www.xcmg.com/product/pro-detail-137429.htm.
[36] BYD Europe B.V. BYD eBus B12[EB/OL]. 2026. https://bydeurope.com/byd-ebus-b12.
[37] 东风汽车集团股份有限公司猛士汽车科技公司. 猛士917[EB/OL]. [2026-04-02]. https://www.m-hero.com/m917.
[38] 珠海航展上的VU-T10履带式无人地面作战平台[J]. 坦克装甲车辆, 2022(23): p.74.
作者|韩伟、程坤、张梓涵、陆怡遐
审核|戈文雅
编辑|张 戈
上一篇:长安汽车取得自动驾驶控制方法专利